Example 11-11: Higher-order ODEs#
So far we have learned that all numerical algorithms used to solve an ODE rely on the slope of the function, \(dy/dt = f(t, y)\), at every time step. This means that the methods are limited to solving 1st-order ODEs or system of 1st-order ODEs. To solve 2nd-order ODEs numerically, we can get around this limitation by converting the 2nd-order ODE to a system of two 1st-order ODEs.
Summary of commands#
No new commands are demonstrated in this exercise, as it will be very similar to Example 11-10.
System of ODEs#
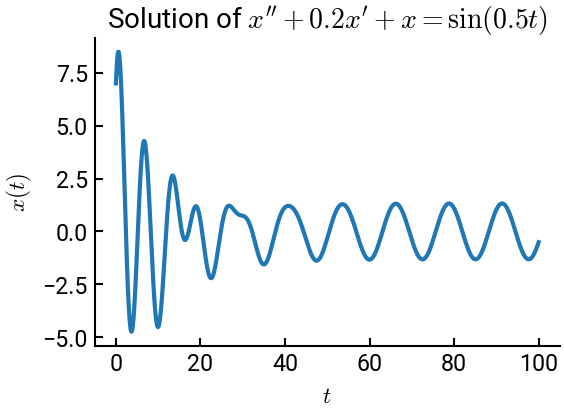
Consider the following example, which represents typical oscillatory motion of a spring-mass system:
\[ \frac{d^2x}{dt^2} + \frac{1}{5} \frac{dx}{dt} + x = \sin(t/2); \quad x(0) = 7, \quad x'(0) = 5 \]
If we define \(y_1(t) = x(t)\) and \(y_2(t) = x'(t)\), then the transformation gives us:
\[\begin{split} \begin{align*}
y'_1 &= y_2 \\
y'_2 &= -0.2 y_2 - y_1 + \sin(0.5 t)
\end{align*} \end{split}\]
which allows us to apply Heun’s algorithm.
# import libraries
import numpy as np
import matplotlib.pyplot as plt
# ODE function
def my_func(t, y):
yp1 = y[1]
yp2 = -0.2 * y[1] - y[0] + np.sin(0.5 * t)
return np.array([yp1, yp2])
# Heun's method function
def heun(f, t0, tf, y0, h):
t = np.arange(t0, tf+h, h)
y = np.zeros([len(t), len(y0)])
y[0, :] = y0
for n in range(len(t) - 1):
k1 = f(t[n], y[n, :])
k2 = f(t[n] + h, y[n, :] + h * k1)
y[n+1, :] = y[n, :] + 0.5 * h * (k1 + k2)
return t, y
# initialization
t0 = 0
tf = 100
h = 0.05
y0 = 7
yp0 = 5
# solve ODE
t, y = heun(my_func, t0, tf, [y0, yp0], h)
# plot results
fig, ax = plt.subplots()
ax.plot(t, y[:, 0], lw=3) # just the first column contains the position
ax.set(xlabel="$t$", ylabel="$x(t)$", title=r"Solution of $x'' + 0.2x' + x = \sin(0.5 t)$")
plt.show()